设置登录密码
*密码
*确认密码
完善信息
*真实姓名
*公司名称
*您的职位
城市
*邮箱
*主营产品
*行业
企业类型
材质
功能







来源:高分子科学前沿|
发表时间:2019-04-04
点击:17046
随着人工智能热潮的兴起,对于高性能的分布式计算越来越苛求。经典的冯.诺依曼架构擅长面对预设的问题,提供精确的计算,顺序解决结构性问题。在智能化社会里,面对人机交互的大量传感信息,传统计算机只能被迫预设更多的答案,其复杂度会指数级递加,因此必须要寻求一种主动式、事件驱动型的信息处理方式。
压电电子学(Nat. Rev.Mater. 2016, 24, 23)作为一个新兴的多学科研究领域,和直接连接/触发,是利用压电势作为栅极来控制载流子在界面处的产生、传输、分离或复合,为机械刺激引起的压电极化与半导体传输特性之间的耦合效应提供了具有相应电输出信号“主动式”触发和传感原型。压电电子学被广泛应用于“主动式”调控半导体器件、能源采集、可植入式医疗和自驱动系统等。目前,压电电子学的发展已不局限于兼具半导体和压电性能的材料对金属-半导体或PN结的界面调控,利用压电势驱动/控制的半导体器件都可以归纳入更广义的压电电子学范畴,例如利用压电势静/动态调控载流子浓度(ACS Nano 2019, 1, 582),调控肖特基势垒器件(Nano Energy 2018, 50, 598),驱动应变传感器(Adv. Mater. 2015, 27, 3411)、压电势写入非易失性存储器(ACS Nano 2016, 10, 11037)和自驱动多级传感器(ACS Nano, 2018, 12, 254)等。
触控操作是当前智能设备的主流交互手段,依据去中心化计算模型处理触觉信息的思路,中科院北京纳米能源与系统研究所的孙其君课题组提出了一种能够通过外界应变的时空特征来调节权重的石墨烯人工传感突触(图1)。该系统包括感测、传输和处理单元,可以简单的看作一个感知神经系统。基于在离子凝胶和石墨烯界面处形成的双电层,压电电势可以取代栅压对人工突触器件进行有效的调控。这项工作代表着将主动式神经形态电子皮肤用于机器人和假肢的方向又前进了一步。
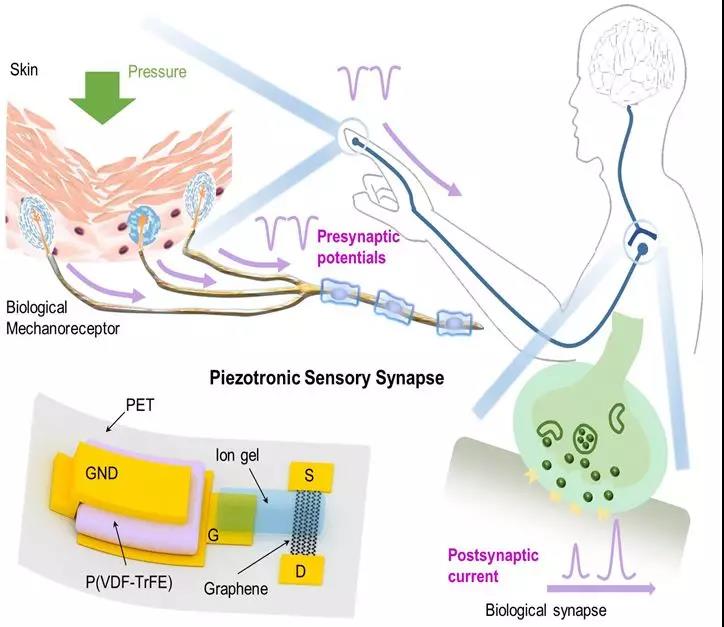
图1. 生物传感过程与人工感知突触器件示意图
凝胶中独特的离子响应行为和石墨烯界面处极强的离子/电子耦合现象,符合神经仿生和生化传感领域的需求。机械刺激引起的压电极化与半导体传输特性之间的效应赋予了输出电势以外部脉冲的时空信息(应变、数量、时间等),电介质中的离子在定向排列的偶极子所产生的压电势的影响下定向聚集,从而对石墨烯沟道的电导进行调控,如图2所示,人工突触器件因此能直接对外部应变进行响应。基于石墨烯的神经网络芯片,配合发电机有源矩阵,可以实现静态、动态压电调控和神经形态机械感觉系统的接口功能。同时,作为兼容光刻工艺的四族材料,很容易利用现有的硅基半导体CMOS产线制造新一代大规模集成电路。
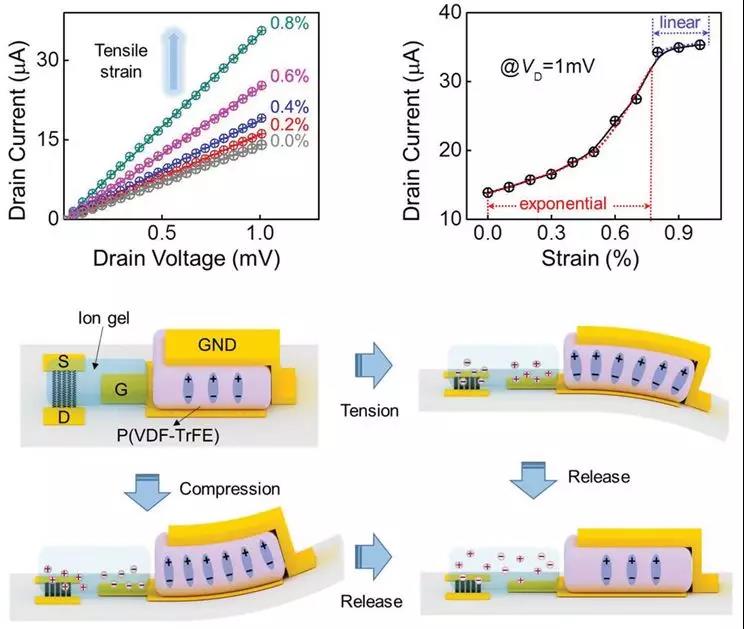
图2. 晶体管器件的基本性能和工作机理
生物神经传导领域的深入研究促进了模仿神经感知反馈的触觉信息处理系统的进一步完善。突触电子学作为仿生神经形态计算中的一个新兴领域展现出了强劲的发展势头。突触可塑性是对感知信号执行分布式计算的基础,依据权重在信号的传输过程中进行初步加工。突触是生物信号在神经纤维中进行传输的物理节点,具备双向可塑性。其权重不光可以增加,以代表一个强化学习的行为,也可以抑制,以保持神经系统的整体低功耗特性(图3)。基于智能压电晶体管模拟的人工突触有助于搭建机器人传感的神经形态界面和实现深度学习,具有模拟实现神经系统的尖峰时序依赖塑性功能的必备条件,还有通过脉冲神经算法来实现人工智能的无监督学习、动作捕捉和模式识别的潜力。
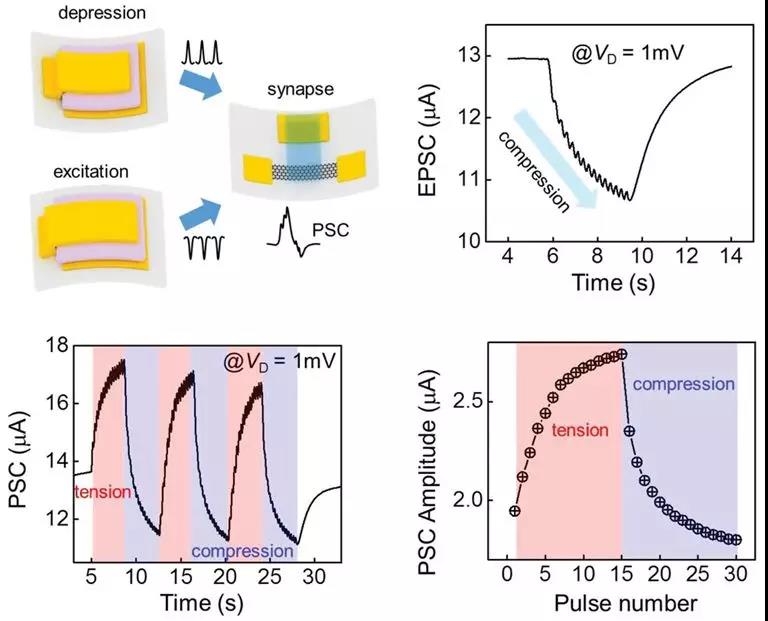
图3. 人工突触的可塑性调节展示
多感知反馈可以在神经网络之间建立起动态时空逻辑关系(图4)。这是感知突触不同于经典的传感器,而独具的神经形态计算特性。作为空间分辨的基本性能,器件对于不同信号源的输入有不同的响应。对于不同顺序的刺激脉冲,器件的响应程度也不同,以实现时间分辨的基础。同时,此人工突触还展示了分别对应于压缩应变和拉伸应变的逻辑关系,这是未来构建更加复杂和多功能的大规模人工神经网络的基本单元,实现并行知觉计算系统的基础。
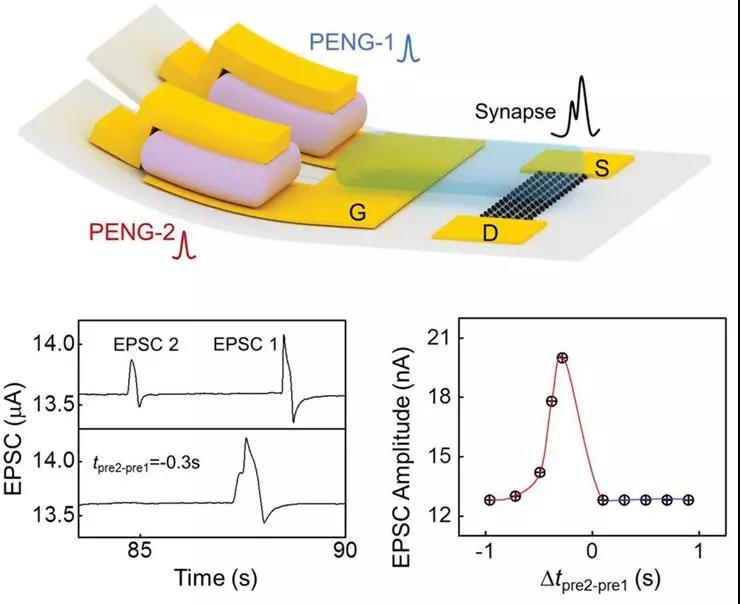
图4. 基于动态时空逻辑的多感知反馈
这项工作可能为自驱动人工智能和神经机器人铺平道路。研究结果以《压电调控石墨烯式人工感知突触》为题发表于《先进功能材料》杂志上,陈有辉、高国云、赵静为共同第一作者。以此工作为基础并拓展,孙其君课题组目前已完成后续更加智能和系统性的工作。
“本文由新材料在线®平台入驻媒体号高分子科学前沿提供,观点仅代表作者本人,不代表本网站及新材料在线®立场,本站不对文章内容真实性、准确性等负责,尤其不对文中产品有关功能性、效果等提供担保。本站提醒读者,文章仅供学习参考,不构成任何投资及应用建议。如需转载,请联系原作者。如涉及作品内容、版权和其它问题,请与我们联系,我们将在第一时间处理!本站拥有对此声明的最终解释权。”