设置登录密码
*密码
*确认密码
完善信息
*真实姓名
*公司名称
*您的职位
城市
*邮箱
*主营产品
*行业
企业类型
材质
功能







来源:前沿材料公众号|
发表时间:2023-04-20
点击:8020
近期,天津大学封伟教授课题组在Advanced Fiber Materials上发表了题为“Hyperelastic Graphene Aerogels Reinforced by In-suit Welding Polyimide Nano Fiber with Leaf Skeleton Structure and Adjustable Thermal Conductivity for Morphology and Temperature Sensing”的研究成果。
在本文中,该工作采用水热还原和原位焊接的实验方法,成功制备了一种超弹性聚酰亚胺纤维/石墨烯气凝胶(PINF/GA),系统性地研究了该复合气凝胶的微观结构、力学性能和导热性能,并通过简便的方法将其应用于柔性触觉传感阵列,测试了其对未知物体形貌和温度同时感知的能力。研究结果表明,PINF/GA在柔性触觉传感、智能人机交互技术领域具有广泛的应用前景。
研究内容
石墨烯气凝胶具有规则的多孔结构、室温下的高载流子迁移率和优异的化学稳定性,在柔性触觉传感领域应用广泛。然而,由于石墨烯片层在反复压缩下容易发生滑动,石墨烯气凝胶的结构稳定性较差;并且现有的压缩应变传感器在应力作用下的传热性能变化尚不清楚,难以用于检测真实温度,使触觉传感技术的进一步发展面临诸多挑战。
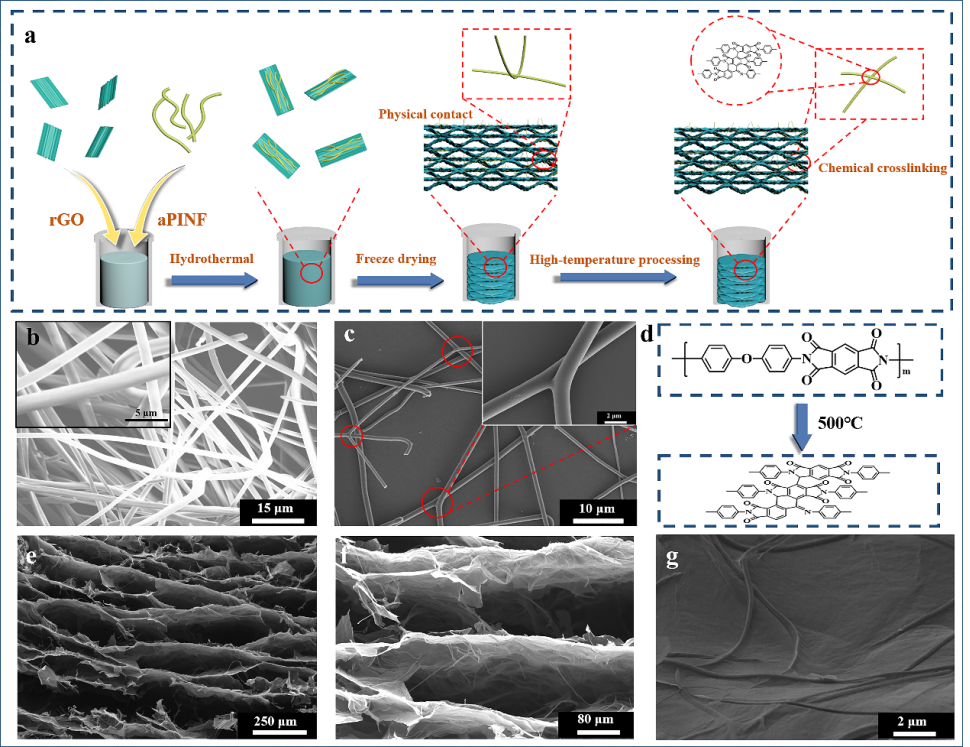
聚酰亚胺纤维/石墨烯气凝胶(PINF/GA)的制备过程可分为水热还原和原位焊接两个步骤(图1a)。首先,采用抗坏血酸作为还原剂,通过水热还原、冷冻干燥等步骤制备未焊接的PINF/GA。然后经高温处理获得原位焊接的PINF/GA,在此期间分散在复合气凝胶内部的聚酰亚胺纤维(PINF)彼此焊接,从初始的物理搭接转变为化学交联,形成三维互联网络(图1b-d)。从SEM图中可以看出,PINF/GA具有独特的拱桥形结构,PINF像叶脉一样分散在石墨烯片层内部,使PINF/GA表现出了优异的结构稳定性(图1e-g)。
图1 PINF/GA制备流程图、SEM照片及PINF“焊接”SEM照片
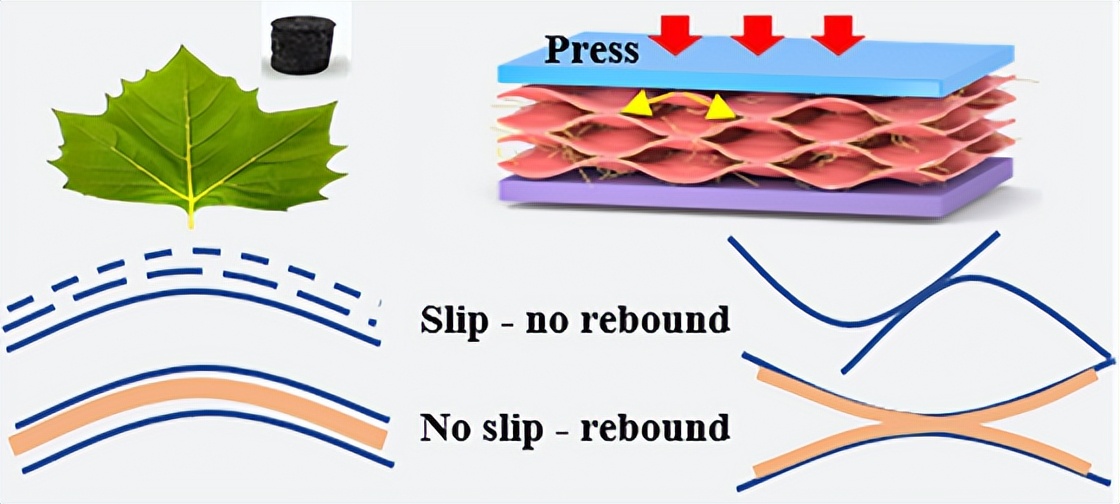
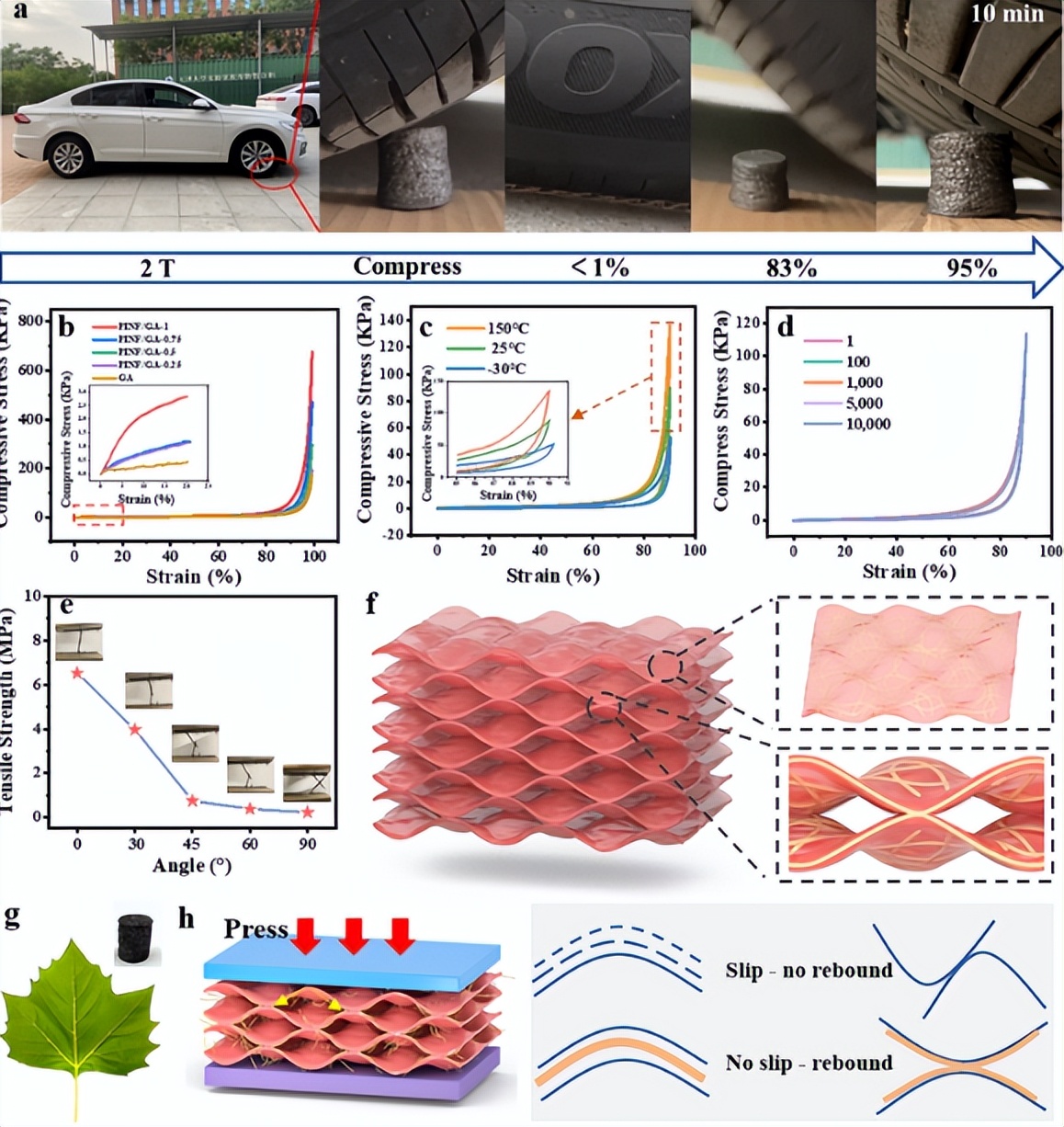
三维互联的PINF网络有效提高了复合气凝胶的回弹性能,使得PINF/GA能够抵抗99%的极限压缩应变而保持结构稳定(图2a-b);能在-30~150℃的温度范围和压缩90%应变的条件下保持良好弹性(图2c),并且具备良好的循环稳定性能(图2d)。之后通过对弹性模型的研究,揭示了PINF/GA回弹的机理,明确了“焊接”的PINF在提高复合气凝胶回弹性能中的作用(图2e-h)。
图2 PINF/GA力学性能表征、弹性模型和回弹机理示意图
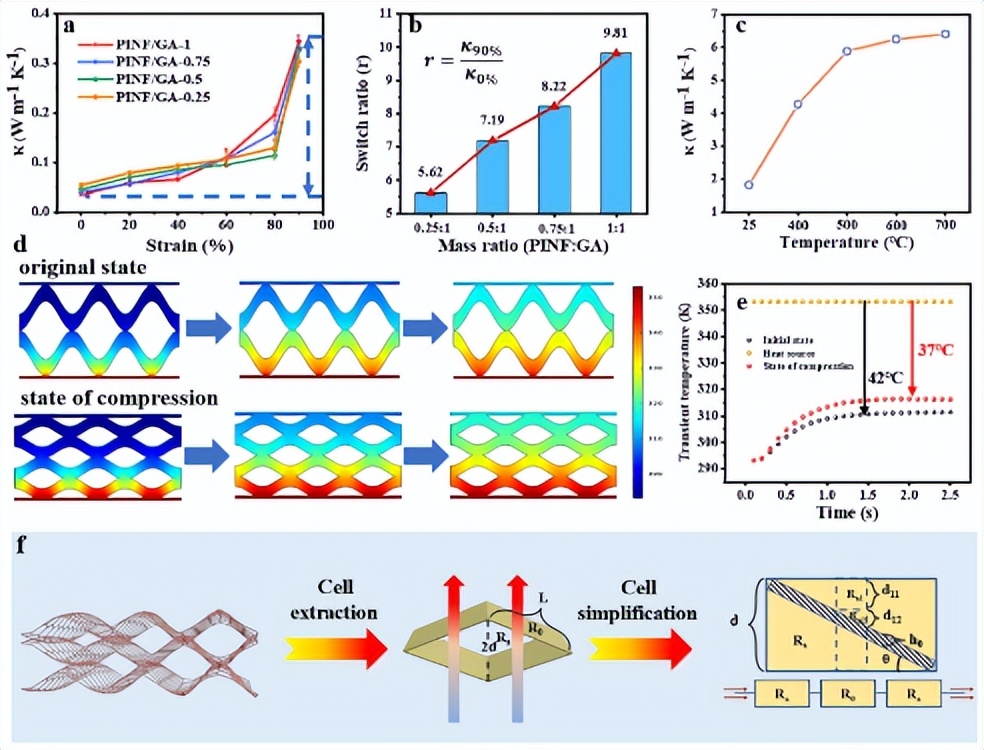
PINF/GA的热性能测试如图3a-b所示,PINF/GA的导热系数具有较高的应力敏感性。由于在压缩过程中复合气凝胶内部空气体积分数减小,石墨烯片层之间的接触位点增加、接触面积增大,从而产生了更多的导热路径,使得PINF/GA在压缩90%的状态下,具有最高的导热系数(0.34 W m-1K-1)和最大的导热系数变化比(9.81)。选取PINF/GA薄膜作为导热基元(图3c),运用有限元模拟和导热方程理论计算的方法(图3d-f),验证了在PINF/GA压缩过程中所提出热传导理论的有效性。
图3 PINF/GA热性能表征、有限元模拟和理论计算示意图
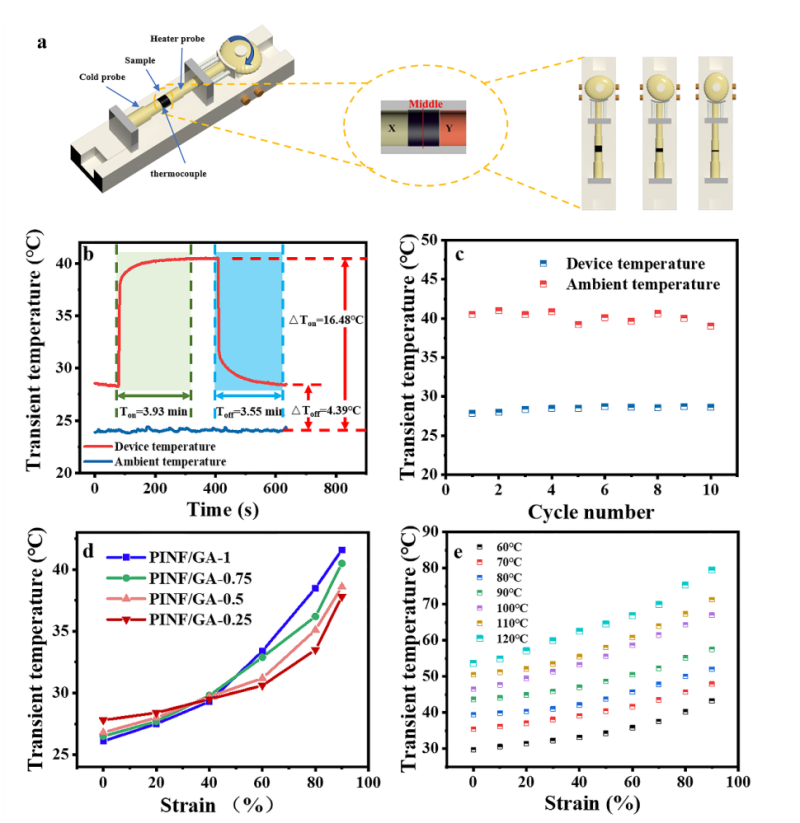
此外,作者还搭建了小型瞬态温度系统,用于验证PINF/GA对热量连续调控的能力(图4a)。结果表明,在压缩传热过程中,PINF/GA具有快速的响应时间和良好的循环稳定性能,当热源温度为62℃时,其最大可调温度范围为12℃(图4b-e)。
图4 PINF/GA小型瞬态温度系统热性能表征
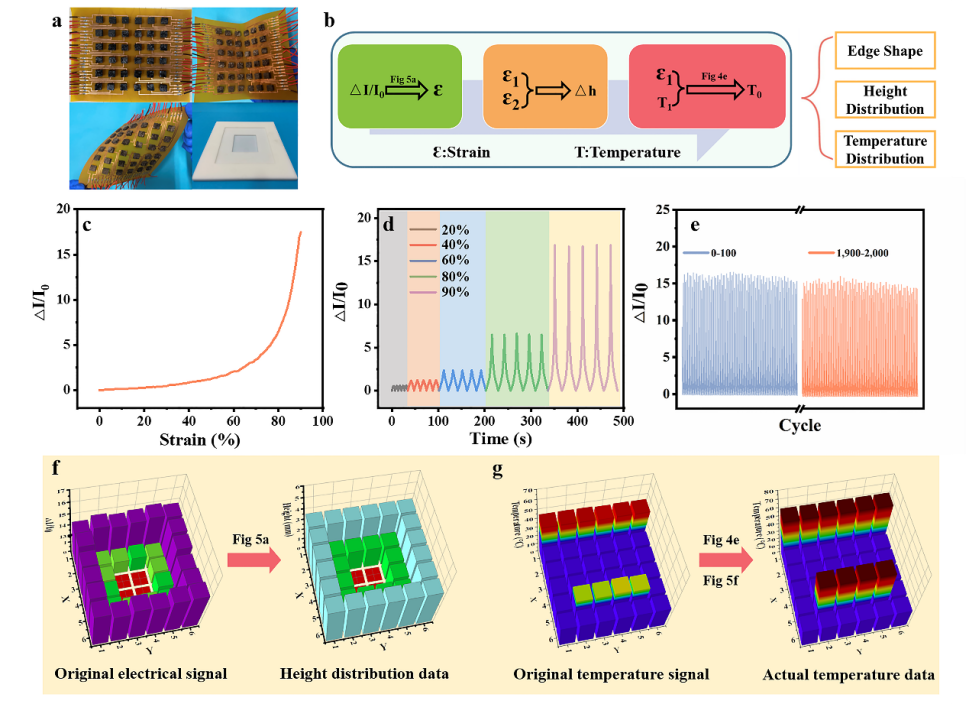
基于PINF/GA导热系数连续可调的特性,作者制备了柔性触觉传感阵列(图5a)。结合PINF/GA传感器压缩程度和温度数据库,柔性触觉传感阵列成功实现了对未知模型边缘形状、高度分布和温度分布的同时感知(图5b-g)。
图5 PINF/GA柔性触觉传感性能表征
展望
综上所述,作者通过水热还原和原位焊接的方法制备了超弹性PINF/GA。该复合气凝胶具有独特的拱桥形结构,宽温度高弹性和良好的循环稳定性,其热导率和电导率具有较高的应力敏感性,导热系数变化比可达9.81。此外,基于温度数据库,构建的柔性触觉传感阵列可以同时检测未知物体的形状、高度分布和温度分布。该工作解决了三维石墨烯网络动态热调节能力差和弹性差的问题,可能对具有宽工作温度范围的柔性触觉传感器的设计产生深远影响。
天津大学硕士研究生殷玮达为本文第一作者,秦盟盟副研究员和封伟教授为通信作者。
封面来源于图虫创意

“本文由新材料在线®平台入驻媒体号前沿材料公众号提供,观点仅代表作者本人,不代表本网站及新材料在线®立场,本站不对文章内容真实性、准确性等负责,尤其不对文中产品有关功能性、效果等提供担保。本站提醒读者,文章仅供学习参考,不构成任何投资及应用建议。如需转载,请联系原作者。如涉及作品内容、版权和其它问题,请与我们联系,我们将在第一时间处理!本站拥有对此声明的最终解释权。”